
Electronique > Réalisations > Interfaces > Interfaces MIDI > MIDI Merger 003
Dernière mise à jour : 16/03/2024Présentation
Ce merger MIDI dispose de deux entrées MIDI et de deux sorties MIDI, et il est plus "intelligent" que mes deux précédents MIDI merger 001 et MIDI merger 002. Il permet le traitement simultané de données sur les deux entrées MIDI et n'en perd pas une goutte tant que le débit des données restent raisonnable (les Sysex étendus de plus de 4 millions d'octets par micro-seconde ne sont pas tolérés).
Caractéristiques principales
- Mémoire tampon de 1000 octets pour chaque entrée.
- Routage In1/In2 vers Out1/Out2 selon souhait utilisateur (sans décâblage des cordons MIDI).
- Premier arrivé, premier servi : l'évenement qui arrive en premier est dirigé en priorité vers la sortie sélectionnée. Les données arrivant sur l'autre entrée sont traitées une fois l'évenement précédent entièrement transmis (on ne mélange évidement pas les évenements de type Note avec les évenements de type MMC ou autres).
- Timeout de sécurité : dans le cas où un évenement n'arrive pas dans son intégralité (problème de liaison ou câble débranché pendant la transmission de données) durant un temps déterminé (par exemple 150 ms), le système peut refuser son envoi sur la sortie sélectionnée.
- Filtrage de messages tels que Pitch-Wheel ou Sysex.
- Décodage/codage de Running Status.
Bien sûr, on peut faire un MIDI-merger avec un PIC plus simple tel que le 16F628A, mais dans ce cas il faut se contenter d'une mémoire tampon fortement limitée (de quelques dizaines d'octets pour chaque entrée MIDI) ce qui suffit peut-être pour des évenements de type Note mais pas vraiment pour des sysex.
Avertissements
Ce projet n'a été testé qu'avec les événements de type Notes, ControlChange, ProgramChange et Sysex.
- Le running status est déjà implémenté pour les données entrantes, mais pas pour les données sortantes.- Les Sysex sont gérées, mais les tests se sont limités à des messages de longueur moyenne (68 octets).
Schéma
Le PIC 18F46K22 utilisé est plus gros qu'un 16F628A, et il est vrai que ses 40 broches peuvent impressionner. Soyons forts.

Le fait d'avoir choisi un "gros" PIC pour ce montage m'a permis d'ajouter de nombreuses lignes d'entrées/sorties. Ce n'était pas prémédité et ces lignes peuvent être omises, ainsi que les douze connecteurs qui s'y rattachent, à savoir J4 à J15.
Entrées MIDI
Chacune des deux entrées MIDI (MIDI IN 1 et MIDI IN 2) aboutit à un optocoupleur PC900, chargé d'isoler galvaniquement la sortie de l'instrument que l'on y connecte. Les résistances R1 et R1' sont chargées de limiter le courant dans la LED contenue dans les optocoupleurs, et les diodes D1 et D1' protègent ces mêmes LED en cas d'inversion de polarité des fils des câbles MIDI. Ces diodes ne sont pas absolument indispensables mais je vous conseille tout de même de les mettre. La sortie des optocoupleurs est chargée par une résistance de 220 ohms (R2 et R2'), au repos nous disposons bien d'un état logique haut sur les entrées Rx des modules UART du PIC.
Gestion des données MIDI
Les données MIDI qui arrivent sur chacune des entrées MIDI aboutissent au microcontrôleur dont la première tâche est de les placer dans une mémoire tampon (buffer circulaire). Les données reçues transitent ensuite vers la sortie MIDI Out sélectionnée, dès que le composant a le temps de les traiter, c'est à dire presque tout le temps. Le routage des données MIDI (vers la sortie 1 ou 2) est effectué selon les souhaits de l'utilisateur, qui dispose pour cela des deux interrupteurs SW1 et SW2 :
- SW1 ouvert et SW2 ouvert (RB4 = 1 et RB5 = 1) : Direct
Normal
Les données MIDI qui arrivent sur l'entrée MIDI_In_1 sont routées vers la sortie MIDI_Out_1
Les données MIDI qui arrivent sur l'entrée MIDI_In_2 sont routées vers la sortie MIDI_Out_2 - SW1 fermé et SW2 ouvert (RB4 = 0 et RB5 = 1) : Merging vers
MIDI_Out_2
Les données MIDI qui arrivent sur l'entrée MIDI_In_1 sont routées vers la sortie MIDI_Out_2
Les données MIDI qui arrivent sur l'entrée MIDI_In_2 sont routées vers la sortie MIDI_Out_2 - SW1 ouvert et SW2 fermé (RB4 = 1 et RB5 = 0) : Merging vers
MIDI_Out_1
Les données MIDI qui arrivent sur l'entrée MIDI_In_1 sont routées vers la sortie MIDI_Out_1
Les données MIDI qui arrivent sur l'entrée MIDI_In_2 sont routées vers la sortie MIDI_Out_1 - SW1 fermé et SW2 fermé (RB4 = 0 et RB5 =
0) : Direct Inverse
Les données MIDI qui arrivent sur l'entrée MIDI_In_1 sont routées vers la sortie MIDI_Out_2
Les données MIDI qui arrivent sur l'entrée MIDI_In_2 sont routées vers la sortie MIDI_Out_1
Bien entendu, les octets des données MIDI reçues sur les deux entrées ne peuvent être transmis (routés) directement vers la ou les sorties, sans un minimum d'intelligence. Ces données sont stockées en attente de leur identification, et c'est seulement quand cette dernière est assurée qu'elles sont transmises "en bloc" sur la sortie choisie, sans "croisement" des données reçues sur les deux entrées. Il va de soi que la gestion la plus délicate concerne le traitement d'un grand nombre de données reçues en même temps sur les deux entrées (sysex sur entrées In1 et In2 en même temps).
Sorties MIDI
Rien de particulier, on retrouve notre broche 4 de la prise DIN reliée au +5 V au travers d'une résistance de 220 ohms (R3 et R3'), la broche 5 de cette même prise DIN recevant les données MIDI venant du PIC via les résistances R4 et R4'.
Fonctions annexes
Fonctions actuellement non implémentées, que j'incluerai dans la prochaine version :
- Timeout
Tout message qui ne se termine pas au bout d'un certain laps de temps après réception de l'entête, peut être éliminé de la liste d'attente des messages à envoyer sur les sorties. - Filtrage
Les lignes RA0 à RA3 (Filter_A à Filter_D) permettent de spécifier les messages à filtrer :
- Filter_A (RA0) : filtrage des messages Active Sensign
- Filter_B (RA1) : filtrage des messages Sysex
- Filter_C (RA2) : filtrage des messages PitchWheel
- Filter_D (RA3) : filtrage des messages Aftertouch
Ces lignes de configuration ne sont actuellement pas exploitées. - Running
Status
Le Midi Merger 003 reconnait le Running Status. Dans la version actuelle, il accèpte les messages standards (sans running status) et compactés (avec running status). Les données émises sur les sorties MIDI peuvent être en mode Standard (sans running status) ou compactée (avec running status). Ce merger peut donc aussi agir en tant que "convertisseur", pour passer de "running status" à "non running status" (décompactage), ou pour passer de "non running status" à "running status" (compactage). Dans le premier cas cela permet de s'adapter à des machines qui ne reconnaissent pas le running status, dans le second cas on profite d'une réduction de débit binaire. Les lignes RA4 et RA5 (RunStat1 et RunStat2) permettent de spécifier si les données émises sur les sorties MIDI OUT sont ou non en mode running status. Ces lignes de configuration ne sont actuellement pas exploitées.
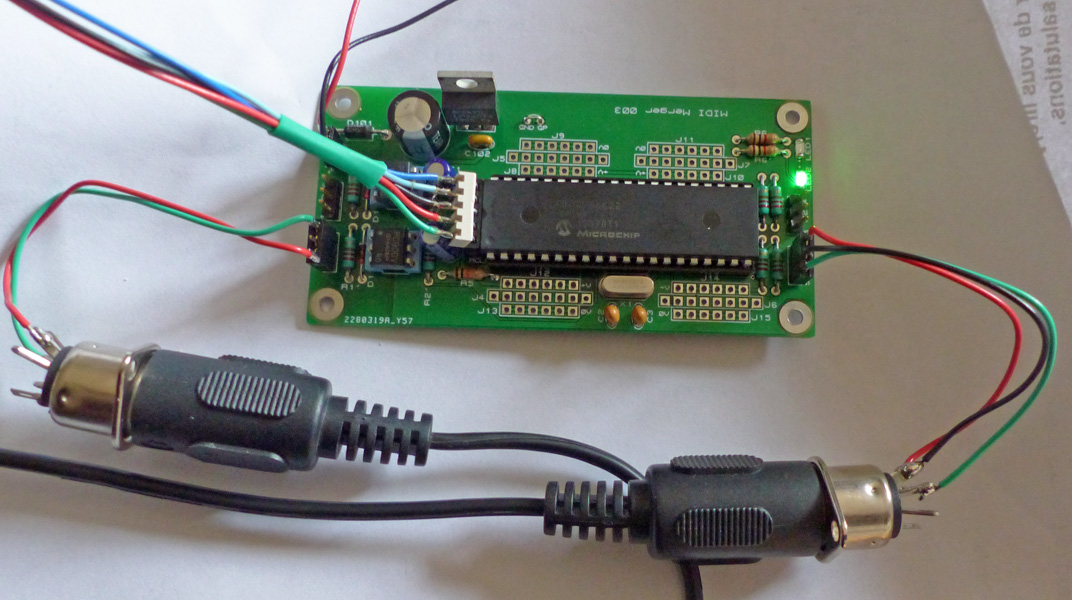
Procédure de tests
J'ai procédé en deux étapes :
- envoi de données simples (notes, CC et PC) et sysex sur les deux entrées MIDI, en alternance rapprochée;- envoi de données simples (notes, CC et PC) et sysex sur les deux entrées MIDI, en simultané.
La seconde méthode est bien entendu moins sympathique pour le microcontrôleur.
Envoi de données en alternance (moins contraignant pour le PIC)
Envoi de données en simultané (un peu plus stressant pour le PIC)
Dans les deux cas, les données en sorties MIDI ont été correctement restituées.
Vue de détail de deux flux courts mergés vers la sortie Midi Out 2
Alimentation
L'alimentation est assurée localement par un petit régulateur de tension tripode 5 V. Une évolution future pourrait consister à rendre le système totalement autonome, sans alim externe, en "repiquant" l'alimentation 5V fournie par une des sources MIDI.
Il est également possible d'utiliser une liaison USB traditionnelle pour récupérer un 5V adapté au mergeur MIDI, la consommation du mergeur MIDI 003 étant largement inférieure au courant qu'on peut tirer d'une liaison USB avec "périphérique non déclaré". Dans ce cas, le câble USB ne transporte aucune donné MIDI et ne sert que de câble d'alimentation. Le régulateur de tension 7805 n'est plus nécessaire et les deux pastilles de circuit imprimé relatives à ses entrée/sortie doivent être reliées ensemble (strap). La diode D101 doit rester en place, car elle constitue une cellule de découplage d'alimentation avec le condensateur C101.
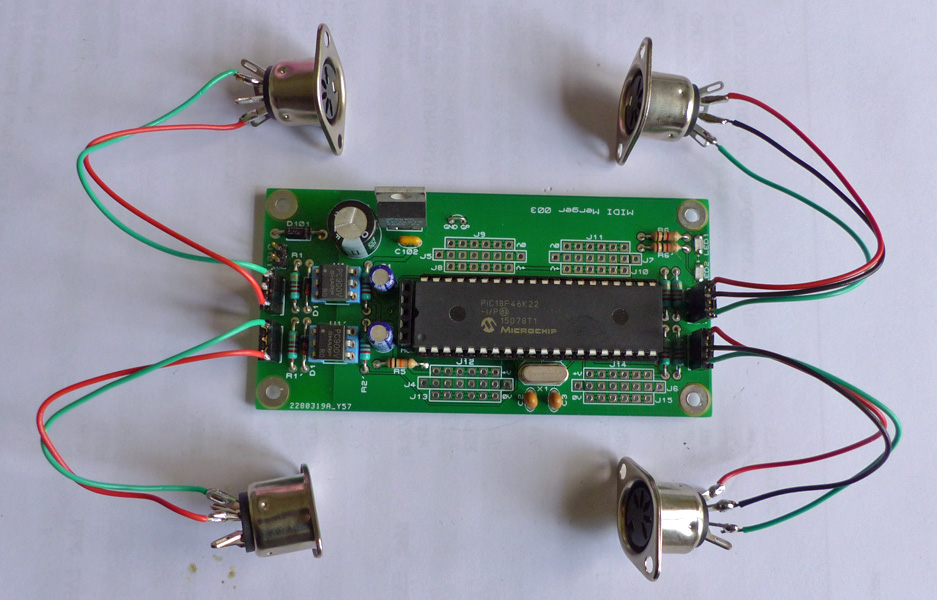
Câblages des prises MIDI
Le câblage est le suivant, attention au sens de la vue (de devant ou de derrière)
La broche 2 n'est reliée à la masse qu'au niveau des sorties et non au niveau des entrées, pour éviter toute boucle de masse entre équipements.
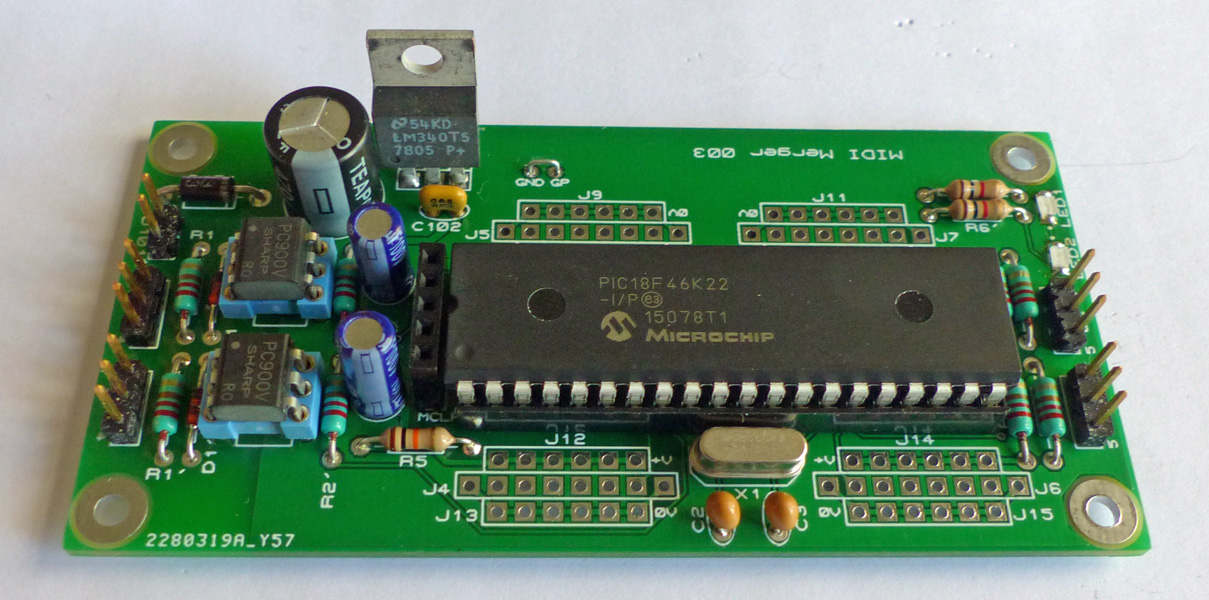
Prototype
Réalisé
selon le dessin de circuit imprimé (PCB) de 2016. J'avais reçu le PCB
en juin 2016 et l'ai redécouvert toujours nu... en mars 2024 !
Il n'était pas trop tard pour l'assembler et le tester de manière un peu plus approfondie ;)
Cette maquette a été l'occasion pour moi de découvrir un bug rigolo : la LED Rx2 restait parfois bloquée quand des messages MIDI arrivaient sur l'entrée MIDI 2 alors que l'entrée MIDI 1 n'avait encore rien reçu depuis la mise sous tension. Le soucis provenait d'une variable incorrectement initialisée au démarrage (et oui, il faut parfois peu de choses pour semer la zizanie dans un programme).
On notera que je n'ai pas soudé les barrettes de contacts prévues à titre d'extensions futures, mais aussi prévues pour raccorder les interrupteurs de configuration. Toutes les entrées non mises à la masse sont donc portées au niveau logique haut grâce aux résistances de rappel (pullup) activées dans le PIC. J'aurai bien le temps d'ajouter ces barrettes dans 8 ans.
Circuit imprimé (PCB)
Réalisé en double face.
Version du 16/03/2024
Typon (PCB) au format PDF
Logiciel du PIC
Fichier compilé (hex) disponible dans l'archive suivante :
MIDI
Merger 003 - PIC 18F46K22 - 16/03/2024
Historique
17/03/2024
- Ajout photos prototype (construit sur PCB de 2016).
- Ajout informations concernant l'alimentation (possible avec connexion USB).
- [PCB] Correction sérigraphie, le signe "+" était imprimé du mauvais côté du connecteur d'alimentation J101.
- [PCB] Les deux condensateurs de découplage d'alimentation C103 et C104 (2 x 100n) sont désormais placés face inférieure.
-
[PIC] Désormais, les LED Rx1 et Rx2 clignotent aussi lors de la
réception des messages CC et PC. Auparavant, ces LED ne s'allumaient
que sur réception des messages de type Note.
- [PIC] Correction bug - Les messages MIDI présentés sur l'entrée MIDI
2 bloquaient parfois une partie du merger, dans le cas où depuis la
mise sous tension aucun message MIDI n'était encore parvenu à l'entrée
MIDI 1. L'entrée MIDI 1 restait quant à elle fonctionnelle.
06/06/2021
- Mise à disposition du PCB, lequel offre désormais (en plus de la
fonction
merger MIDI) des E/S supplémentaires pour extensions futures.
- Le logiciel PIC du 09/10/2016 n'a pas changé.
09/10/2016
- Première mise à disposition.